ICT Applications - Part 2

This is the second of the five part series on ICT applications. Here lets see the use of computers in automatic oven/cooker, central heating systems, chemical process control, glasshouse environment control, turtle graphics, computer modelling of a traffic light, robots in manufacturing.
Explain how an automatic oven/cooker works based on a computer and sensors?
An automatic cooker/oven has temperature sensors and a number of controls to set the cooking time, i.e., when to switch the cooker/oven on and off. Firstly, the start time and end time or the actual cooking time are entered. Then, the cooking temperature is selected.
The microprocessor checks the set time against the current time and when they are equal, the cooker/oven heating elements are switched on. Once the cooker/ oven starts the cooking process, the microprocessor then constantly checks the end time against current time. This end time may be a pre-set value entered by the user or it may be a value calculated by the microprocessor, based on the cooking time entered. When they are equal, the cooking process is stopped.
The microprocessor checks the temperature data sent from a sensor and turns the heating element on if the value is less than the preset value chosen by the user. If the temperature is greater than or equal to the preset value, then the heating element is switched off by the microprocessor.
Once the cooking process is finished, the microprocessor sends a signal to a beeper to make a beeping sound to indicate that the cooking cycle is completed.
Explain how computers and sensors can be used in central heating systems?
A gas supply is used to heat water in a boiler. A valve on the gas supply is controlled by a microprocessor and is opened if the heating levels need to be increased. A water pump is used to pump hot water around the central heating system whenever the temperature drops below a preset value. The steps below explains how a computer controlled central heating system works:
- The required temperature is keyed in and this is stored in the microprocessor memory. Tthis is called the preset value.
- The temperature sensor constantly sends data readings to the microprocessor.
- The sensor data is first sent to an ADC to convert the analogue data into digital data.
- The digital data is sent to the microprocessor.
- The microprocessor compares this data with the preset value.
- If the temperature reading is greater than or equal to the preset value then no action is taken.
- If the temperature reading is less than the preset value, then a signal is sent:
- to an actuator, via a DAC to open the gas valve to the boiler.
- to an actuator, via a DAC to turn on the water pump.
- The process continues until the central heating is switched off.
Explain how computers and sensors can be used in chemical process control?
Lets say a certain chemical process only works if the temperature is above 80°C and the pH (acidity) level is less than 3.8. Sensors are used as part of the control system. A heater is used to heat the reactor and valves are used to add acid when necessary to maintain the acidity.
Now lets see how the sensors and computer are used to control this process:
- Temperature and pH sensors read data from the chemical process.
- This data is converted to digital signals using an ADC and is then sent to the computer.
- The computer compares the incoming data with preset values stored in memory if the:
- temperature is less than 80°C, a signal is sent to switch on the heaters
- temperature is greater than or equal to 80°C, a signal is sent to switch off the heaters
- pH is greater than 3.8, then a signal is sent to open a valve and acid is added
- pH is less than or equal to 3.8, then a signal is sent to close this valve
- The computer signals will be changed into analogue signals using a DAC so that it can control the heaters and valves.
- This continues as long as the computer system is activated.
Explain how computers and sensors are used in glasshouse environment control?
Five different sensors could be used here to control the glasshouse environment, namely, humidity, moisture, temperature, pH and light. Because of the number of sensors, this is clearly quite a complex problem.
So to simplify the same, let us consider the humidity sensor only. This sends a signal to an ADC which then sends a digital signal to the computer. This compares the input with stored or preset values and decides what action needs to be taken.
- If humidity is greater than the preset value, the computer sends a signal to a DAC to operate the motors to open windows thus reducing the humidity.
- If it is less than the preset value, the computer sends a signal to open valves to spray water into the air.
- If the reading is the same as the preset value, then no action is taken.
- The control process continues as long as the system is switched on.
Similar processes can be used for all five sensors.
List out different types of sensors and their possible applications.
| Sensor type | Possible applications |
|---|---|
| Temperature | Used in the control of central heating systems, glasshouse environment. |
| Used in the control of/measuring temperatures in a chemical process. | |
| Moisture | Measuring/used in the control of a glasshouse environment. |
| Measuring moisture levels in any process. e.g., in the production of electronic components. | |
| Oxygen/carbon dioxide | Environment monitoring, e.g., measuring the oxygen content in a river to check for pollution. |
| Measuring carbon dioxide levels in a glasshouse. | |
| Light | Measuring the light levels in a glasshouse. |
| Measuring for light levels in a dark room used in photography. | |
| Used with automatic doors. | |
| Infra-red | Detecting an intruder by the breaking of an infra-red beam. |
| Allows microprocessor to count items. | |
| Pressure | Detecting intruders in a burglar alarm system. |
| Counting vehicles as they pass over a bridge. | |
| Acoustic | Picking up sounds, e.g., footsteps when used in a burglar alarm system. |
| Detecting liquids or solids moving in pipes/check for blockages in pipes. | |
| Motion | Detecting movement as in virtual reality interface devices. |
| Detecting movement in rooms/gardens/housing compounds to switch on lights. | |
| pH | Measuring acid/alkaline levels in a river pollution monitoring. |
| Used in a glasshouse to measure soil acidity/alkalinity. | |
| Used to measure acidity in a chemical process. | |
| Proximity/distance | These tend to be another name for the above sensors such as infra-red, motion, etc. |
Why use sensors and computer systems to control processes?
The advantages and disadvantages of measurement applications (covered in ICT Applications - Part 1) are also applicable for control applications.
Note : In the exam you need to write them in detail.
There are a couple of additional advantages to consider too:
- The response time, if some parameter is out of range, is much faster.
- If a process is dangerous it is better to control it from a distance.
What is turtle graphics?
Turtle graphics is based on the computer language called LOGO. This is essentially the control of the movement of a 'turtle' on a computer screen by a number of key commands which can be typed in.
The most common commands are:
| Command | Meaning |
|---|---|
| FORWARD x | Move x cm forward |
| BACKWARD x | Move x cm backward |
| LEFT d | Turn left through d degrees |
| RIGHT d | Turn right through d degrees |
| REPEAT n | Repeat next set of instructions n times |
| ENDREPEAT | Finish the repeat loop |
| PENUP | Lift the pen up |
| PENDOWN | Lower the pen |
What is computer modelling?
A computer model is the creation of a model of a real system in order to study the behaviour of the system. The model is computer generated and is based on mathematical representations.
The real idea behind this is to try to find out what mechanisms control how a system behaves. This makes it possible to predict the behaviour of the system in the future and also see if it is possible to influence this future behaviour.
Computer models have the advantage in that they save money, can help find a solution more quickly and can be considerably safer.
Explain how the modelling (simulation) of a traffic light done?
At a Y-junction, a set of traffic lights are to be modelled.
In this computer model it is necessary to consider:
- How and what data needs to be collected.
- How the computer model is carried out.
- How the system would work in real life.
How and what data needs to be collected?
For a computer model to be as realistic as possible so that it succeeds, data needs to be collected by watching traffic for a long period of time at the Y-junction and the best way to do is using induction loop sensors which count the number of vehicles at each junction. Though manual data collection is possible, it is prone to errors and difficult to do over say 20-hours per day. The sort of data that would need to be collected or considered for collection is as follows:
- Count of the number of vehicles through passing the junction in all directions at different times of the day.
- The day of the week (weekends, bank holidays, etc. can alter how the data need be interpreted).
- How long it takes a vehicle to clear the junction.
- how long it takes the slowest vehicle to pass through the junction.
- Whether there are any pedestrian crossings etc. nearby
- Whether there are other factors which might affect the junction (e.g. left turns, right turns, filtering, etc.).
How is the computer model carried out?
The computer model is run after entering the data from the above process into the computer. Once the designers are satisfied that it models the real situation accurately, i.e., by comparing results obtained with actual traffic flow from a number of data sets, then different scenarios can be tried out.
For example:
- Increase the number of vehicles stopped at part of the junction and then change the timing of the lights to see how the traffic flow gets affected.
- Increase or decrease the traffice flow in all directions.
- Vary the timing of the lights and see how the traffic flow gets affected.
- Consider how emergency vehicles affect traffic flow at different times of the day.
How would the system works in real life?
- Sensors in the road gather data and count the number of vehicles at the Junction.
- This data is sent to a control box or to a computer, if necessary, by converting it into a form understood by the computer.
- The gathered data is compared to data stored in the system. The stored data is based on model predictions which were used to optimise the traffic flow.
- The control box or computer 'decides' what action needs to be taken.
- Signals are sent out to the traffic lights to change their timing if necessary.
Generally speaking, why are computer models done?
The reasons which computer models are made are:
- They are less expensive than having to build the real thing, e.g., a bridge.
- On many occasions it is safer to run a computer model as some real situations could be hazardous, e.g. a chemical processes.
- It is much easier to try out various scenarios in advance with computer models.
- Sometimes because of the high risk involved or the remoteness, it is impossible to try out some tasks in real life, e.g., outer space, under the sea, nuclear reactors, crash testing cars, etc.
- Time scales are reduced by doing a computer model rather than the real thing, some applications would take years before a result is known e.g., climate change calculations, population growth, etc.
What are the various areas where computer models are used to understand the actual scenarios?
The areas where computer models are used are:
- population growth
- training pilots and drivers
- modelling queues at checkouts
- crash testing of cars
- running chemical and nuclear plants
- financial modelling
- weather predictions.
How are robots programmed for use in manufacturing?
Robots are used in many areas of manufacturing, from heavy work right through to delicate operations. Examples include: paint spraying of car bodies, welding bodywork on cars, manufacturing of microchips, manufacturing electrical goods and automatic warehouses.
Control of robots is either through embedded or built-in microprocessors or linked to a computer system. Programming of the robot to do a series of tasks is generally done in two ways:
-
The robot is programmed with a sequence of instructions which allow it to carry out the series of tasks, e.g. spraying a car body with paint.
-
Alternatively, a human operator manually carries out the series of tasks; this can be done in two ways. Let us assume an object is being painted using a robot arm.
- The robot arm is guided by a worker when spraying the object; each movement of the arm is stored as an instruction in the computer.
OR - The worker straps sensors to his own arm and sprays the object; each movement is stored as a set of instructions in a computer; the sensors send back information such as position relative to the object, arm rotation, and so on - this information forms part of the instructions stored in the computer.
- The robot arm is guided by a worker when spraying the object; each movement of the arm is stored as an instruction in the computer.
Whichever method is used, once the instructions have been saved, each series of tasks can then be carried out by a robot arm automatically. Each instruction will be carried out identically every time, e .g. assembling parts in a television, giving a consistent product.
Robots are often equipped with sensors so they can gather important information about their surroundings and also preventing them from doing 'stupid things', e.g., stopping a robot spraying a car if no car is present, or stop the spraying operation if the supply of paint has run out, etc.
Robots are very good at repetitive tasks. However, if there are many different tasks, e.g., making specialist glassware for some scientific work, then it is often better to still use human operators.
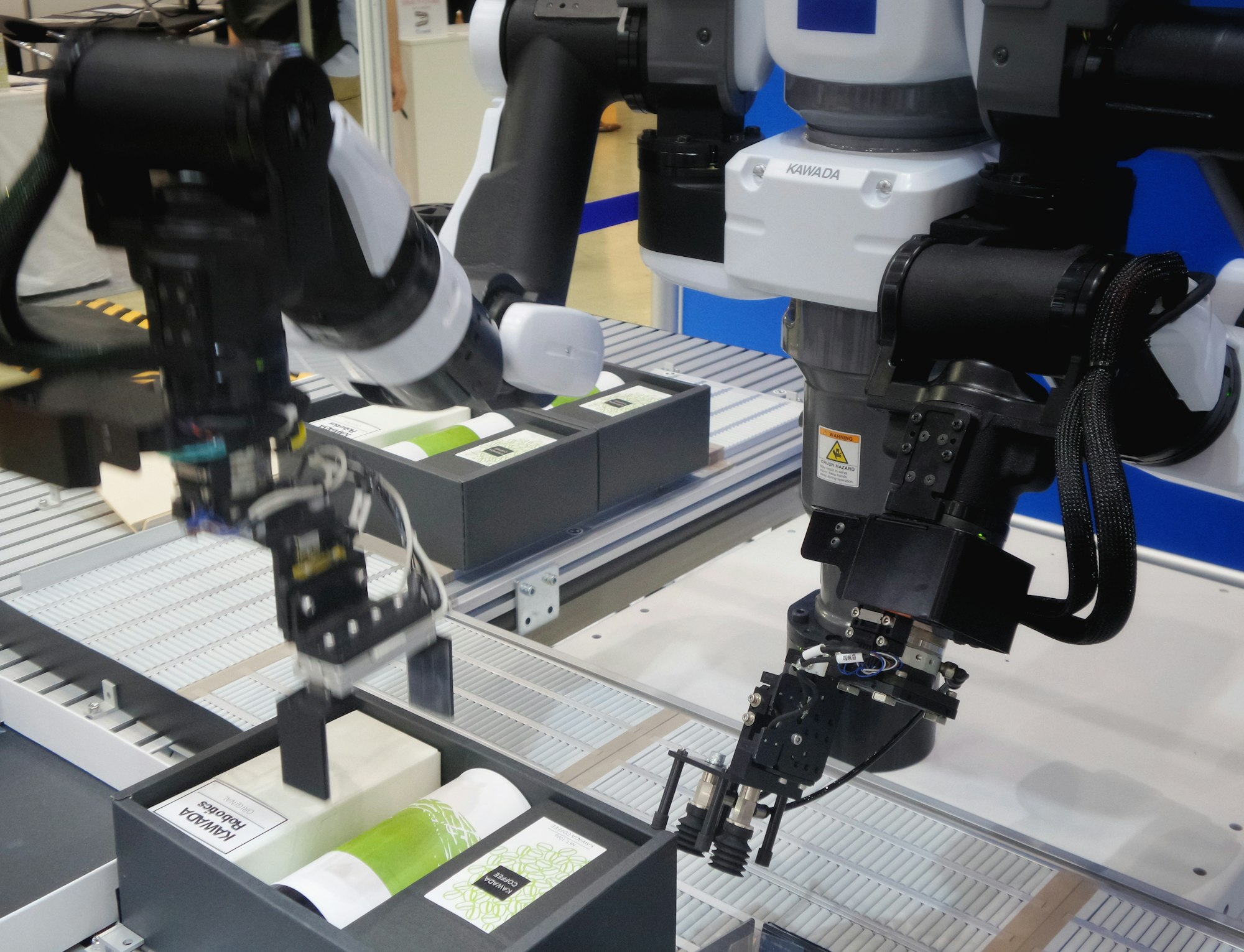
Manufacturing process using robots
What are the advantages and disadvantages of having robots in an manufacturing environment?
The following advantages and disadvantages can be seen in an manufacturing environment:
Advantages
- They can work in environments harmful to human operators.
- They work out to be less expensive in the long term although initial acquisition cost are high as they don't need to be paid wages.
- They can do boring, repetitive tasks leaving free to do other more skilled work like say quality control or design work.
- They can work non-stop 24/7.
- Greater consistency in work. e.g., every car coming off an assembly line is identical.
- Higher productivity as they don't need holidays, etc.
Disadvantages
- They can cause higher unemployment by replacing skilled labour.
- They find it difficult to do 'unusual' tasks. e.g., one-off glassware for a chemical company.
- As robots are independent of the skills base, factories can be moved anywhere in the world, again causing unemployment.
- Since robots do many of the tasks once done by humans, there is a real risk of certain skills, such as welding or painting, being lost.
- The initial set-up and maintenance of robots can be expensive.
This is the end of this guide. Hope you enjoyed it! Thanks for using www.igcsepro.org! We hope you will give us a chance to serve you again! Thank you!